自動運転システムのためのシナリオ作成
エンブフォーでは、自動運転システム用のテストシナリオを作成しています。
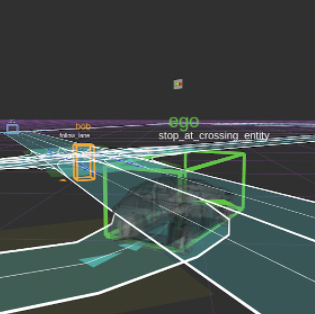
自動運転システムは大規模で複雑であり、開発を進める度にシミュレータによる動作検証が必要です。動作検証にはシナリオと呼ばれる、他の車両・歩行者の動きや自車の目的地などを定義する必要があります。
膨大にあるテストケースに対して一つ一つシナリオを作成する必要があり、テストケースを再現する方法も様々です。
エンブフォーではシナリオ作成のノウハウを活かして、迅速に自動運転用のテストシミュレーションシナリオを作成・提供します。
自動運転システムの性能解析
株式会社ティアフォー及び株式会社システム計画研究所(ISP)が共同で開発している性能解析ツールの開発支援を行っています。
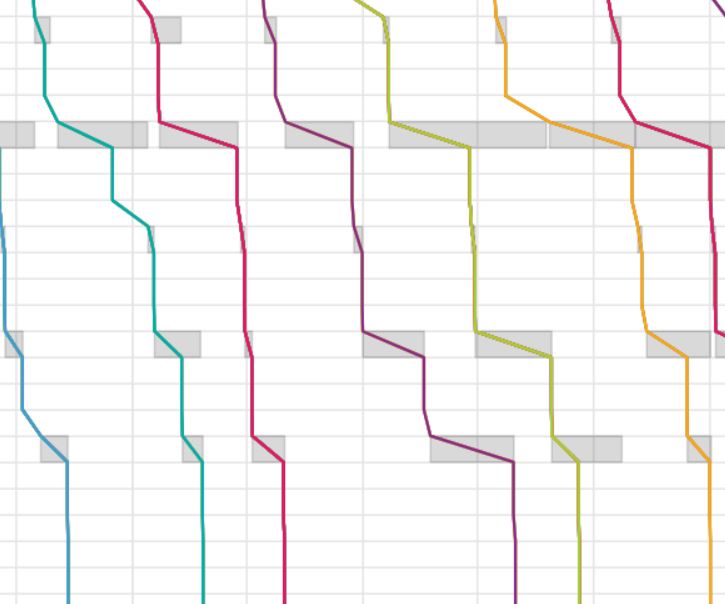
自動運転システムの問題点を特定するためには、実験データを分析し、パフォーマンスを可視化することが必要です。
エンブフォーでは、実証実験時のCPU使用率・メモリ使用率などを可視化するツールや、自動運転一連の処理にかかる時間を計測・可視化するツール(CARET)の開発・適用・拡張を行いました。
このノウハウを生かして、性能解析に必要なツールの開発支援します。
センサ・自動運転処理の二重化
芝浦工業大学情報工学科の新熊研究室では「デジタルツインによりセンサレス自律移動を可能にする多重複合センサネットワーク」の研究開発が実施されています(https://www.jst.go.jp/start/project/sbir-one.html)。
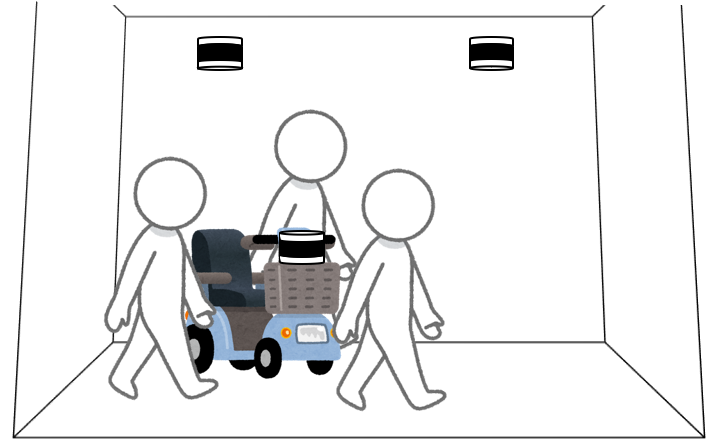
従来の自動運転システムでは、自己位置の推定や物体検知は自車に設置されたセンサで行われていました。しかし、センサの周囲に遮蔽物がある場合、正しいデータを取得できず誤った処理を起こす危険性があります。
そこで、設置型のセンサを町中に置き、そのセンサデータを自車に送ることにより、自車センサと設置型センサの二重化が可能です。さらに自動運転処理を自車とサーバ両方で個別に計算することで、どちらかに障害が発生した際にも、もう片方で走行可能になります。
そのような枠組み・自動運転システムをエンブフォーで開発支援しています。